Eén aspect van robotisering van veldwerkzaamheden is routeplanning, d.w.z. het ontwerp van de route die een autonoom voertuig zoals de HWodKa-Robotiller moet volgen. De simpelste manier is de voordoen-nadoen methode: log de gereden route en laat de robot het nadoen. Uitdagender is het om over een app te beschikken die een routeplan kan maken.
Routeplanning op basis van een werkpadenplan
Voor het ontwerpen van een routeplan is het handig om te beschikken over een zogenaamd werkpadenplan, d.w.z. een overzicht van alle paden (werkgangen) op een perceel waar een bepaalde bewerking uitgevoerd moet worden, bijvoorbeeld de zaaibedbereiding. Simpel gezegd volgt het routeplan dan uit het in een gewenste volgorde verbinden van de afzonderlijke werkpaden.
Werkpadenplan op basis van GAOS
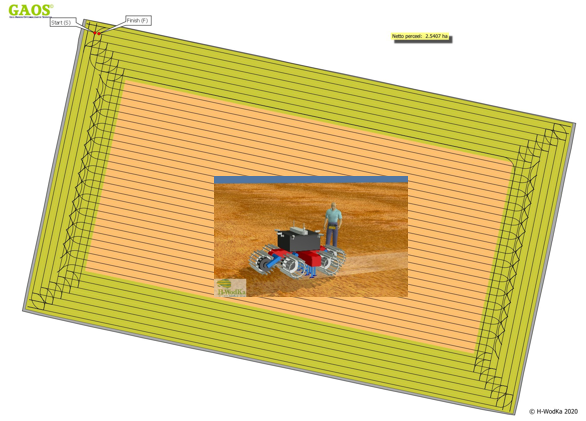
Het werkpadenplan kan met GAOS ontworpen worden. GAOS verdeelt op een slimme manier een perceel ('brutoperceel') in een rompakker, kopakkers, teeltvrije zones en eventueel akkerranden. De rompakker en de kopakkers vormen samen het te bewerken cq te betelen perceel ('nettoperceel'). Daarnaast voorziet GAOS nettoperceel van een werkpadenplan (en AB-lijnen). Afbeelding 1 toont een voorbeeld van een GAOS-inrichting van een perceel, inclusief werkpaden.

Afb. 1 Voorbeeld van een perceel met een GAOS padenplan voor een 3,00 m bewerking. Het nettoperceel is geel gemarkeerd. De breedte van de kopakker past bij de toepassing van een 39,00 m veldspuit. De werkpaden (werkgangen) die bedoeld zijn voor de veldspuit zijn rood gemarkeerd. GAOS voorziet alle werkpaden van een rangnummer.
Verbinden van werkpaden op de rompakker
Er zijn verschillende methoden om paden te verbinden. Bekende methoden voor het verbinden van de paden op de rompakker zijn de U-bocht, de Ω-bocht en de visstaart-bocht. De verbindingspaden zijn in beginsel niet bedoeld om een bewerking uit te voeren, maar alleen om de machine naar het begin van een (volgend) werkpad te leiden.
  |
 |
 |
Afb. 2 Schematische voorbeelden van de (vlnr) U-bocht (extended), de Ω-bocht en de visstaart-bocht om paden op de rompakker te verbinden. Voor robots die in krab-gang kunnen bewegen kunnen twee paden door een rechte lijn verbonden worden. Dit is een voordeel voor percelen zonder kopakkers. De keuze van de soort bocht hangt onder meer af van de werkbreedte en de draaicirkel van de robot en de afstand tussen twee te verbinden paden. Omgekeerd kan het routeplan ook afgestemd worden op de draaicirkel van de robot.
Afbeelding 3 toont een routeplan voor het navigeren op de rompakker van het bovengenoemde perceel. De keuze van het startpunt is de eerste stap in routeplanning, gevolgd door het bepalen van de volgorde van de paden. Een simpele volgorde is die waarbij telkens naar het naastliggende pad 'gesprongen' wordt. In de praktijk geeft men vaak de voorkeur aan 'overslaan-invullen' (skip-and-fill). Bij die werkwijze wordt telkens een pad overgeslagen om daarna het overgeslagen pad te volgen (bijvoorbeeld 1>3>2>5>4…).
Afb. 3 Routeplan voor het navigeren op de rompakker. Het startpunt ligt bij de dam die toegang verleent tot het perceel. Het doel is om na het bewerken van de rompakker dicht bij het startpunt uit te komen. Het aantal paden is oneven, om die reden wordt de robot eerst, via een verbindingspad, naar de zuidoost hoek geleid om daar aan de eerste werkgang te beginnen. Voor het keren op de kopakkers is hier gekozen voor de visstaart-bocht (ontwerp L. Klompe).
Verbinden van werkpaden op de kopakkers
Het ontwerp van een routeplan voor een perceel zonder kopakkers is relatief eenvoudig. Wanneer wel voorzien wordt in kopakkers, zoals in de gangbare akkerbouw gebruikelijk is, moet een keuze gemaakt worden hoe de kopakkers bewerkt moeten worden. De kopakkers kunnen elk apart bewerkt worden, maar ook samen met de beide flanken van de rompakker. Deze bewerking wordt een bewerking-rondom of een contourbewerking genoemd. De contourbewerking van een hoekig perceel vergt speciale methoden om door of om een hoek te navigeren. In afbeelding 4 worden hiervan twee voorbeelden gegeven.
 |
 |
Afb. 4 Schematische weergave van twee methoden om respectievelijk door een hoek en om een hoek te navigeren.
Afb. 5 Routeplan voor de contourbewerking waarbij genavigeerd wordt op de (7) werkpaden van de kopakkers en de flanken van de rompakker. Het startpunt van dit deel van het routeplan valt samen met de finish van het deel van het routeplan voor de rompakker en eindigt dicht bij de dam. De contourbewerking wordt tegen de wijzers van de klok uitgevoerd. Bij de eerste 5 paden, gerekend vanaf de rompakker, wordt 'om-de-hoek' genavigeerd. Het routeplan voorziet er in dat het navigeren op het 5e pad gevolgd wordt door het 7e pad (d.w.z. langs de omtrek van nettoperceel) en eindigt met het 6e pad. Bij de laatste 2 omgangen wordt 'door-de-hoek' genavigeerd opdat de robot niet buiten de perceelgrens reikt (ontwerp L. Klompe).
Afb. 6 Het complete routeplan (ontwerp L. Klompe).
In het project HW2O-Robotiller werkt HWodKa samen met Gonzalo Rodriques Mir, een Argentijnse electronics engineer, gespecialiseerd in software ontwikkeling voor robots en precisielandbouw en eigenaar van Mobotsoft (www.mobotsoft.com). Mobotsoft heeft een app ontwikkeld waarmee een routeplan voor een veldrobot gemaakt kan worden. In een volgend nieuws item wordt nader ingegaan op route planning m.b.v. Mobotsoft-CloudFarming.
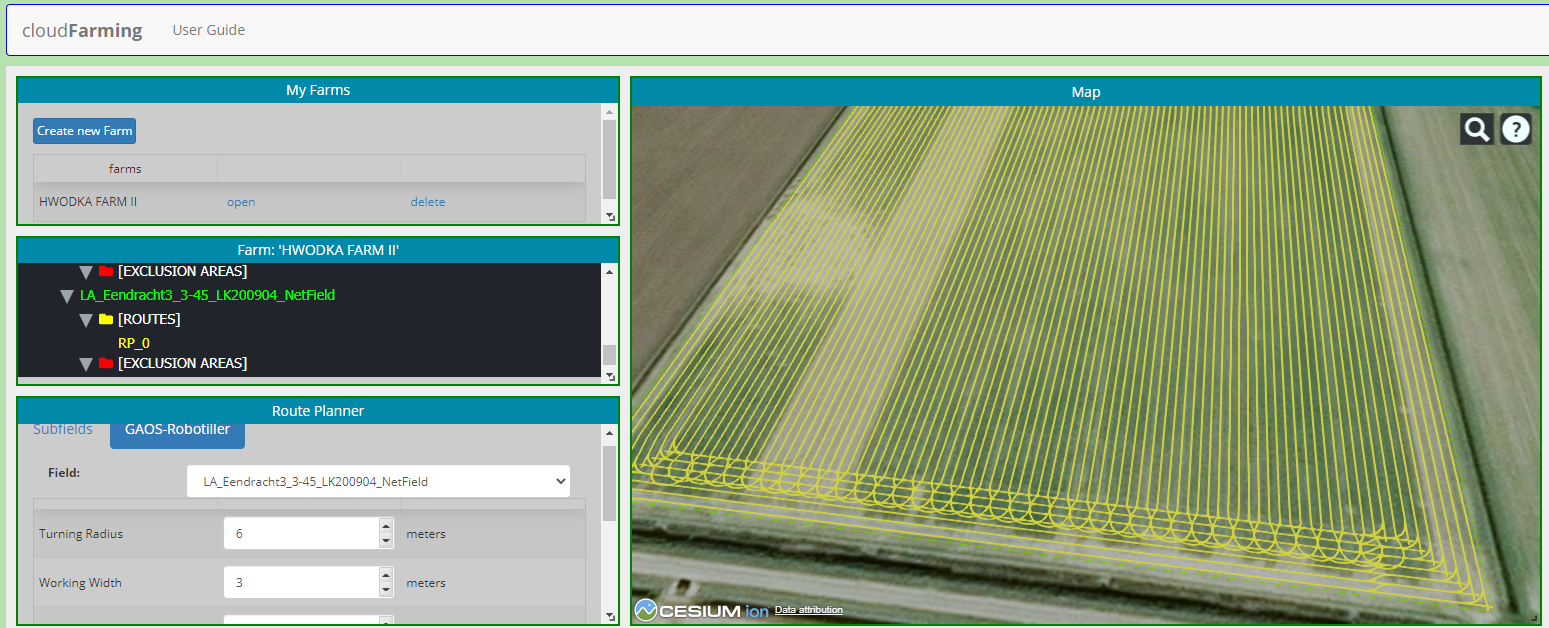
Afb. 7 Schermafbeelding van Mobotsoft-CloudFarming.
HWodKa werkt in het POP3-project "Robotisering voor het ontlasten van de bodem" aan de ontwikkeling van een veldrobot voor de zaaibedbereiding i.s.m. Reedyk Hydrauliek Klaaswaal en met ondersteuning van CZAV, Nedato en Cosun.
©HWodKa 2020 en L. Klompe