Na een beoordelingsprocedure van 16 maanden heeft het samenwerkingsverband HW2O, onder aanvoering van Leen Ampt (HWodKa), op 14 augustus j.l. bericht ontvangen van de provincie Zuid-Holland dat het POP3-project "Robotisering voor het ontlasten van de bodem" voor subsidie in aanmerking komt. Het POP3-project betreft de ontwikkeling van een veldrobot ("Robotiller") voor zaai- en pootbedbereiding. De Robotiller is een onderdeel van een meeromvattend plan voor duurzaam bodembeheer (zie elders op deze website). Het samenwerkingsverband wordt ondersteund door Cosun Beet Company, CZAV en Nedato.
Robotisering van veldwerkzaamheden is een vereiste voor het in stand houden van de plantaardige productie in regio's waar steeds minder mensen het veldwerk willen en/of kunnen doen. Robotisering is ook nodig in regio's waar de huidige generatie landbouwmachines tot overbelasting van de bodem leidt. Nederland behoort tot deze regio's. Het doel van het project is om, samen met andere soortgelijke initiatieven, de vraag naar en het (NL!) aanbod van veldrobots te stimuleren.
Het zou mooi zijn wanneer het Nederlandse bedrijfsleven, samen met agrarische ondernemers en met ondersteuning van kennisinstellingen, een voortrekkersrol zou vervullen. Alle ingrediënten zijn aanwezig, maar de bundeling van krachten bleek niet zo eenvoudig. Het is geen toeval dat op de WUR-Boerderij van de Toekomst (nu nog) met veldrobots van buitenlandse makelij geëxperimenteerd wordt.

Afb. 1 De Greenbot van Dutch Power Company-Precisionmakers. Te vroeg gepiekt of " the best is yet to come"?
In de aanloop naar het project heeft HWodKa gezocht naar partijen die inhoudelijk konden bijdragen aan de ontwikkeling van een veldrobot. Die partijen, met expertise op verschillende gebieden, bleken ruim voor handen te zijn. Echter, geen van de partijen wilde of kon de eindverantwoordelijkheid voor een werkende machine dragen. Bij toeval kwamen we in contact met Reedyk Hydrauliek uit Klaaswaal, een outsider in de agrarische wereld. De eigenaar, Dirk Reedijk, durfde de uitdaging wel aan en heeft de verantwoordelijkheid op zich genomen voor het ontwerp en de bouw van de Robotiller binnen de kaders van het POP3-project.
Veldrobots in soorten en maten
Er leiden meer wegen naar Rome. Zo wordt er wereldwijd gewerkt aan veldrobots in de vorm van onbemande trekkers. Dit is bij uitstek het domein van de bekende trekkerfabrikanten. Dit type veldrobot wordt gekenmerkt door voorzieningen om een grote trekkracht uit te kunnen oefenen, bijvoorbeeld voor het trekken van niet-aangedreven grondbewerkingswerktuigen, zoals een schijveneg.

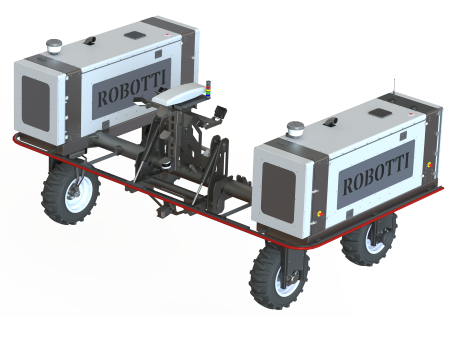
Afb. 2 Voorbeeld van een autonome, multifunctionele trekker.
Daarnaast verschijnen autonome werktuigdragers, met voorzieningen voor het dragen van verschillende soorten werktuigen, bijvoorbeeld voor zaaien en voor onkruidbestrijding.
Afb. 3 Voorbeeld van een veldrobot in de vorm van een multifunctionele werktuigdrager, in gebruik op de WUR Boerderij van de Toekomst.
Beide genoemde soorten veldrobots werken met bestaande werktuigen en zijn multifunctioneel, d.w.z. voor meer soorten bewerkingen inzetbaar, net zoals de 'ouderwetse' allround trekker.
Er zijn ook veldrobots die 'slechts' één bewerking kunnen uitvoeren. Alle kenmerken van deze "monofunctionele" veldrobots zijn afgestemd op het zo optimaal mogelijk uitvoeren van die ene bewerking, bijvoorbeeld onkruidbestrijding.

Afb. 4 Voorbeeld van een monofunctionele veldrobot.
Het concept waar HWodKa voor gekozen heeft is ook een voorbeeld van een monofunctionele veldrobot (voor zaai- en pootbedbereiding). Het idee is dat de Robotiller voor de trekkerpoot- of zaaimachinecombinatie uitwerkt en een optimaal verkruimeld en uniform aangedrukt zaai- of pootbed levert. Het zaaien of poten kan vervolgens met een relatief lichte combinatie uitgevoerd worden.
Een nadeel van een dergelijke veldrobot is, dat hij maar weinig uren kan maken en daardoor niet rendabel zal zijn (tenzij de bewerkingskwaliteit substantieel beter is). Dit nadeel kan overwonnen worden wanneer de krachtbron en het brein, die samen de meeste waarde vertegenwoordigen, uitwisselbaar zijn met één of meer andere veldrobots, bijvoorbeeld voor rugopbouw, onkruidbestrijding, zaaien, stoppelbewerking, etc. De multifunctionele trekker is dan geëvolueerd tot een multifunctionele krachtbron/brein zonder onderstel. Toegegeven, het vergt wat verbeeldingskracht om in dit concept te geloven.
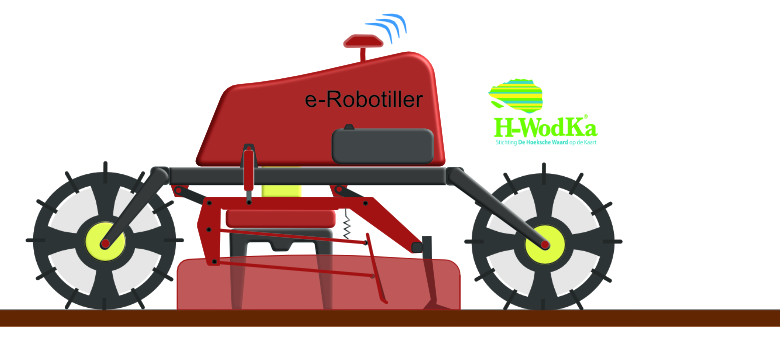
Afb. 5 'Artist-impression' van de HWodKa-Robotiller, een monofunctionele veldrobot.
Je hoeft geen Elon Musk te heten om te voorzien dat waterstof dé energiedrager van het akkerbouwbedrijf van de toekomst is. Om hierop te anticiperen voorziet het project in de toepassing van een H2-brandstofcel met een continu vermogen van 50kW als krachtbron voor de Robotiller. Dit kenmerk van de Robotiller sluit mooi aan bij andere H2-initiatieven in de regio.
Uit het bovenstaande volgt, dat het HW2O POP3-project niet gaat over het ontwerp van een prototype dat op korte termijn opgevolgd wordt door een 0-serie. Het ontwerp betreft een concept-veldrobot die als stimulans moet dienen voor de ontwikkeling van de vraag naar en het aanbod van nieuwe, broodnodige technieken, bij voorkeur van Nederlandse makelij.
©HWodKa 2020