Een moderne trekker-werktuigcombinatie wordt meestal niet meer bemand door een chauffeur maar door een operator. Alleen de route naar en van het perceel vergt nog wat stuurmanskunst.
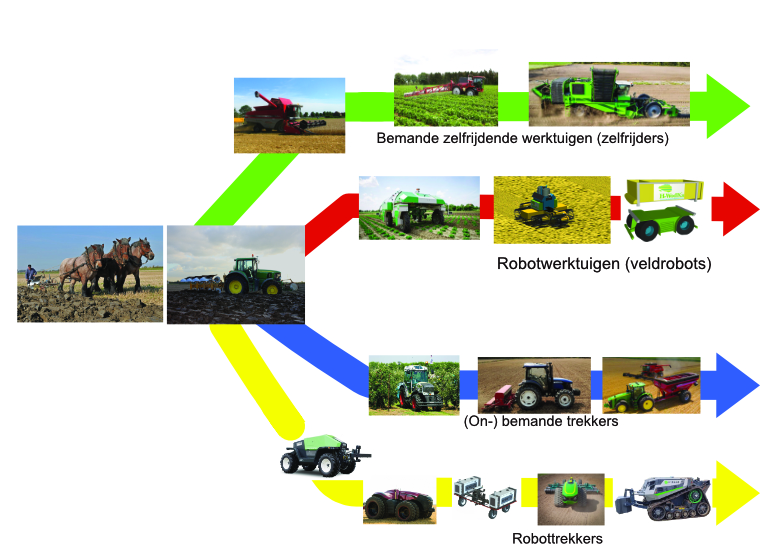
Afb. 1 De Robotiller in de context van robotisering van veldwerzaamheden.
Een operator heeft twee taken: kijken of het werk naar wens is en ingrijpen als dat nodig is. De volgende stap is om de operator te vervangen door een digitale controller. Dit levert dan een soort ‘hybride’ trekker op die zowel bemand als onbemand kan werken, de (on-)bemande trekker (blauwe pijl). Het bemannen van deze trekker is vooral handig bij het transport naar en van het veld. Eén van de pioniers die werkt met dergelijke trekkers is Gerrit Kurstjens in Australië. Probotiq was één van de technische pioniers. Het is aannemelijk dat de bekende trekkerfabrikanten achter de schermen werken aan trekkers van deze soort.
De autonome trekker-werktuigcombinatie moet zelf zijn werking controleren en zich indien nodig aanpassen aan de omstandigheden en problemen oplossen. Het heen en weer rijden over een perceel is geen grote opgave. Echter, zodra een autonome machine een intensieve wisselwerking aangaat met een gewas en/of de grond wordt het complexer en vergt dat een intensieve samenwerking tussen de trekker en het werktuig. Met de ontwikkeling van TIM (Tractor Implement Management) wordt hierop geanticipeerd.
Een relatief eenvoudige toepassing van een onbemande trekker is het verzorgen van het veldtransport van de oogstmachine naar een overslagplaats. O.a. Raven werkt aan oplossingen voor dergelijke toepassingen (Raven Auto Cart®). De insteek is nu vooral arbeidsbesparing. Echter, vanuit het oogpunt van bodembelasting kan autonoom veldtransport ook interessante perspectieven bieden. Bijvoorbeeld wanneer gewerkt wordt met kleinere units die de draagkracht van de bodem niet overtreffen.
HWodKa beschouwt het veldtransport van m.n. de hakvruchten als belangrijkste oorzaak van bodemverdichting en introduceerde elders op deze website een autonome carrier, zie
hier. De autonome carrier (afb. 1 rode pijl, rechts) vervult niet alleen het veld
transport, maar neemt ook de
bufferfunctie ( cq de bunker) van de oogstmachine over, zodat die lichter en wendbaarder uitgevoerd kan worden. De toepassing van de auto-carrier vergt een knip tussen veld- en wegtransport. Dit hoeft niet persé meer als nadeel uitgelegd te worden omdat veld- en wegtransport steeds meer verschillende eisen stellen aan de transportmiddelen.
Een optimale benutting van gescheiden veld- en wegtransport vergt een ingrijpende vernieuwing van het logistieke systeem op het veld, op de weg, op het erf en in de schuur. Het gaat nog verder, ook de ontsluiting en verkaveling van percelen kunnen onderdeel zijn van deze vernieuwing. Dit is meer een hindernis dan een nadeel, want vernieuwing van de ontsluiting en de verkaveling biedt tevens nieuwe mogelijkheden voor o.a. robotisering, verbetering van de waterhuishouding, strokenteelten en natuurinclusieve landbouw. Dit past in het beeld van “De Akkerbouw van de Toekomst”.
Een cabine-loze autonome trekker of werktuigdrager (robottrekker; afb. 1 gele pijl) beoogt hetzelfde te kunnen als een (on-)bemande autonome trekker, maar dan tegen lagere kosten omdat deze trekker veel eenvoudiger uitgevoerd kan worden. In situaties waarbij relatief vaak van de weg gebruikt gemaakt wordt zijn trekkers van dit type in het nadeel t.o.v. (on-)bemande trekkers. De Greenbot en de Agbot zijn twee inspirerende Nederlandse voorbeelden.
Steeds meer bewerkingen worden uitgevoerd door zelfstandige werktuigen, de zelfrijders (afb. 1 groene pijl). De bekende zelfrijders lenen zich in het algemeen niet voor onbemande toepassingen. Robotisering biedt echter wel kansen voor de ontwikkeling van een nieuwe soort zelfstandige werktuigen, in eerste instantie vooral voor arbeidsintensieve bewerkingen, zoals onkruidbestrijding, en relatief eenvoudige bewerkingen, zoals grondbewerking. De veldrobots van deze soort zijn ‘dedicated’ veldrobots, d.w.z. toegespitst op het uitvoeren van één taak. De HWodKa-Robotiller is hiervan een voorbeeld. Veldrobots hoeven niet met allerlei 'vreemde' aangekoppelde werktuigen samen te werken, dat maakt hun ontwerp een stuk eenvoudiger. Ook voor veldrobots is het wegvervoer een punt van aandacht.
Het idee van de Robotiller is eveneens ontstaan vanuit het oogpunt van bodembelasting. De zaai- en pootbedbereiding heeft plaats wanneer de bodem nog relatief weinig draagkrachtig is. De Robotiller speelt hierop in door zijn (relatief geringe) gewicht over de volledige breedte van een werkgang te verdelen. De wisselwerking tussen de machine en de grond is weliswaar niet heel complex, maar er zijn wel een paar uitdagingen zoals: de diepteregeling en de verkruimeling in relatie tot bodemverschillen binnen een perceel, de vlaklegging en het zogenaamde ‘aanladen’ van plakkerige grond. Het kenmerk dat de machine over de hele breedte afsteunt op de bodem maakt de diepteregeling al iets makkelijker, er hoeven geen wielsporen geëgaliseerd te worden. Om de verkruimeling beter in de vingers te hebben is het een voordeel om met aangedreven verkruimelelementen te werken, waarvan het toerental regelbaar is, maar dat is iets van latere zorg. Het voorkomen van en/of opheffen van ‘aanladen’ en verstoppingen door gewasresten zoals groenbemesters heeft een hogere prioriteit want deze problemen staan autonomie echt in de weg.